Afin de permettre le développement de la mobilité urbaine aérienne, au-delà de nouveaux prototypes d’engins eVTOL, il convient de construire les infrastructures qui seront capables de les recevoir. Ces infrastructures devront cumuler plusieurs qualités essentielles : garantir la sécurité des aéronefs, des usagers et de l’environnement, permettre la recharge de ces engins électriques, et surtout être situées en plein cœur des villes et à proximité des interconnections des différents moyens de transport. Les principes de conception des vertiports sont encore au stade de projets car les engins eVTOL ne sont pour le moment que des prototypes. Cet article vise à poser les principes de base de la conception et les éléments de réglementation déjà connus et publiés.
I. Définir l’emplacement d’un vertiport :
Même si la réglementation officielle doit encore être élaborée, il existe déjà des critères précis pour la construction des vertiports. Les premiers critères étant leur emplacement, leur dimensionnement, leur intégration au sein de l’espace aérien et la prise en compte de l’aérologie locale.
Emplacement :
Destinés à améliorer les flux de mobilité au sein des zones urbaines les vertiports devront être situés à des carrefours de mobilité.
- Emplacement idéal : interconnections des mobilités.
L’empreinte physique d’un vertiport :
Les zones opérationnelles doivent être dégagées de tout obstacle pour permettre la sécurité des opérations et la manœuvrabilité des aéronefs, afin de ne causer aucun dommage au public environnant.
Un vertiport est d’abord une surface en dur qui accueille l’aéronef posé. Cette surface est protégée par une aire de sécurité (solide pour un vertiport au sol, immatérielle dans le cas d’un vertiport en terrasse). En plus d’une aire de poser et de son volume de protection, un vertiport nécessitera des volumes de protection dédiés aux décollages et aux atterrissages.
Il est donc facilement compréhensible que l’implantation d’un vertiport nécessite une empreinte physique importante du fait des volumes de protection nécessaire à son exploitation. Ces volumes devront être pris en compte pour le choix des emplacements.
- Emplacement idéal : zone dégagée en banlieue ou campagne, en terrasse sur la toiture d’immeubles élevés en zone urbaine dense.
Un espace aérien dégagé :
Le vertiport s’intègre ensuite dans un environnement aérien. Différents espaces et volumes sont dédiés aux différents usagers et usages de l’espace aérien. L’emplacement du vertiport devra être choisi en fonction de l’espace aérien dans lequel il est intégré afin que les aéronefs le desservant puissent être intégrés au trafic aérien de manière conforme, sécuritaire et opérationnelle.
- Emplacement idéal : au sein d’un aéroport ou hors d’une CTR, à proximité d’itinéraires de transit aérien (autoroutes, fleuves, itinéraires publiés…), dans des zones non contrôlées hors de tout trafic aérien.
L’aérologie (vents et turbulences) :
Un aéronef décolle et atterri toujours vent de face. Pour une exploitation optimale, un vertiport devra donc avoir deux trajectoires d’approche et de décollage distinctes. Idéalement orientées à 180° l’une de l’autre ce qui permettra de mener les opérations aériennes dans un maximum de configuration de vents. Un aéronef est aussi sensible aux turbulences.
Un vertiport devra donc être positionné et conçu pour permettre les évolutions face aux vents dominants et être placé loin des éléments générateurs de turbulences.
- Emplacement idéal : orienté dans le flux des vents dominants et préservé des sources de turbulences.
II. Éléments de réglementation pour les vertiports :
L’Agence Européenne de l’Air et de l’Espace (EASA), instance de réglementation de l’aviation civile en Europe, a travaillé sur ces normes de construction des vertiports.
Un document intitulé « Proposed Means of Compliance with the Special Condition VTOL » a été publié le 23 juin 2021. Ce document pose les bases de la réglementation de l’UAM. En voici une synthèse pour la partie concernant les vertiports.
A. Les objectifs de sécurité Établit par l’EASA :
Pour définir ces critères de sécurité, l’EASA s’est basée sur des éléments concernant les avions, pour lesquels les objectifs de sécurité sont proportionnels au nombre de passagers à bord ; et les hélicoptères, pour lesquels les objectifs sont basés sur la catégorie de l’hélicoptère (A ou B selon la capacité à poursuivre le vol en cas de panne moteur).
Pour les eVTOL l’EASA a défini deux catégories combinant ces deux approches et le type d’opération réalisé.
- La catégorie enhanced (avancée) est nécessaire dans le cadre d’une utilisation au sein d’une zone encombrée (d’une ville par exemple) ou d’un transport de passagers (Air taxi).
- La catégorie basique concerne tous les autres types d’opération (vol privé ou transport de marchandises par exemple).
Un engin VTOL de la catégorie basique devra être capable, en cas de panne, d’effectuer un atterrissage d’urgence contrôlé. Un engin de la catégorie améliorée devra être capable, en cas de panne moteur, de continuer à voler en toute sécurité pour rejoindre sa destination ou atterrir en sécurité sur le vertiport le plus proche.
B. Les Procédures de décollage :
Par essence un eVTOL peut décoller et atterrir suivant une infinité de trajectoires possibles. Trois grandes catégories de trajectoires sont communément utilisées par les hélicoptères et servent de principe de base à la réglementation hélicoptère de nos jours.
- Le décollage conventionnel depuis une zone dégagée au sol.
- Le décollage en puissance depuis une zone ponctuelle au sol ou en terrasse.
- Le décollage vertical depuis une zone (au sol ou en terrasse) environnée d’obstacles.
Ces trajectoires impliquent toutes des paramètres de décollage et d’atterrissage différents (puissance nécessaire, distance de décollage, exposition aux risques, recouvrement en cas de panne, marge de franchissement d’obstacles…). Par exemple une montée verticale n’est possible qu’à pleine puissance moteur, elle devient impossible sur un moteur. De même qu’un atterrissage forcé sur un moteur ne peut s’effectuer depuis la verticale d’un point de poser. Ainsi donc pour assurer un décollage monomoteur en cas de panne au cours du décollage, il faut limiter la puissance demandée en limitant la charge utile, ou utiliser une trajectoire demandant le moins de puissance disponible (décollage conventionnel).
Ces considérations ont conduit le législateur à édicter des règles de certification pour les hélicoptères. Pour certains types d’exploitation (SAMU, Offshore…) les hélicoptères doivent respecter un ensemble de performances minimales (classe de performance 1) selon les phases de vol afin de garantir qu’en cas de panne la poursuite du vol est possible. À l’inverse un hélicoptère monomoteur (classe de performance 3) n’a aucune protection en cas de panne moteur et sera contraint à un atterrissage forcé. La réglementation lui interdit donc le survol de zones urbaines par exemple.
L’EASA a donc repris cette logique et l’a adaptée aux eVTOL dans son projet de réglementation.
Le décollage conventionnel :

C’est un type de décollage adapté aux zones dégagées (champ, piste). L’engin peut alors profiter de l’effet de sol et accélérer progressivement. La demande de puissance est faible, en cas de panne moteur il lui reste une réserve de puissance suffisante pour assurer le respect de la trajectoire réglementaire ou la capacité de se poser en sécurité dans l’espace restant.
- Cette trajectoire est contraignante car elle implique une grande zone dégagée d’obstacle.
- Elle sera appliquée et applicable en campagne dans des espaces à faible densité où le foncier n’est pas limité.
Le décollage conventionnel en hauteur :

C’est un décollage effectué depuis une terrasse dont l’environnement est dégagé d’obstacles. L’aéronef monte à la verticale jusqu’à un point de décision puis réalise son envol en suivant une trajectoire oblique.
Ce point de décision est déterminé selon l’aéronef et ses performances et permet en cas de panne de savoir quelle décision prendre. Avant ce point il doit se reposer sur la plateforme. Après ce point l’appareil a atteint une hauteur suffisante pour réaliser une accélération en descente qui lui permet de venir chercher les paramètres de vol nécessaire à une montée dégradée (n-1 moteur). Le tout en franchissant les obstacles avec une marge de sécurité suffisante.
- Cette trajectoire est contraignante car elle implique la présence d’une infrastructure en terrasse.
- Elle sera appliquée et applicable en zone urbaine à forte densité.
- C’est la trajectoire la plus indiquée à des opérations VTOL en zone urbaine. Elle offre un bon compromis en termes de pilotabilité, de charge utile transportable, et d’infrastructure. (Une activité économique autre peut être envisagée sous la terrasse et une terrasse peut être ajoutée à un bâtiment existant).
Le décollage vertical :

C’est un décollage effectué depuis une zone (au sol ou en terrasse) dont l’environnement est encombré d’obstacles. L’aéronef monte à la verticale jusqu’à un point de décision après lequel il réalise une montée en suivant une trajectoire oblique.
Ce point de décision est déterminé selon l’aéronef et ses performances. En cas de panne avant ce point il doit se reposer sur la plateforme. Après ce point de décision l’appareil a atteint une hauteur suffisante pour réaliser une accélération en descente qui lui permet de venir chercher les paramètres de vol nécessaire à la montée avec un moteur en panne. Le tout en franchissant les obstacles avec une marge de sécurité suffisante.
Cette trajectoire n’est pour le moment pas utilisée en classe de performance 1 par les hélicoptères du fait de la puissance nécessaire en cas de panne. Il y a donc de plus en plus de création d’héliports en terrasse du fait de la pression foncière autour des héliports au sol et des volumes réservés aux trouées.
- Cette trajectoire est contraignante car elle implique de conserver une réserve de puissance suffisante permettant la montée et l’atterrissage vertical en conditions dégradées. Ce qui signifie que la charge pourra être limitée.
- Elle sera appliquée et applicable en zone urbaine à forte densité.
- Pour peu que les aéronefs soient suffisamment puissants pour effectuer ce type de décollage avec une charge utile pertinente, ce type de procédure pourrait être la plus avantageuse en termes d’infrastructure et d’occupation des sols.
C. Volume de protection :
Ces trajectoires de vol en conditions dégradées sont à leur tour protégées par un volume de protection qu’on appelle les trouées d’envol et d’atterrissage. Il y a donc une redondance de la sécurité : l’aéronef est certifié pour respecter une trajectoire en conditions dégradées et le vertiport est certifié pour assurer un volume de protection autour de ces trajectoires. De mêmes que les trajectoires, ces volumes de protection existent pour les hélicoptères et varient selon l’usage qui est fait de l’hélistation et de la classe de performance exigée.


Trouée CP1 Hélicoptère – Illustration Arrêté TAC
L’EASA ne décrit pas les volumes de protection associés aux trajectoires conventionnelles et conventionnelles en terrasse. On peut penser que ces volumes se rapprocheront de l’existant. Le volume décrit ci-dessous est celui associé au décollage vertical depuis un vertiport dont l’environnement est encombré.

Le volume gris clair représente le volume d’évolution des eVTOL : les constructeurs d’engins VTOL devront démontrer lors de la certification que leur aéronef en cas de panne restera dans ce volume.
Le volume gris foncé établit une marge de sécurité à ce premier volume : aux fabricants de vertiports de certifier qu’aucun obstacle ne pénètre ce volume.
L’écart entre les deux permet cette redondance de la sécurité.
La base au sol de ce volume est l’aire de sécurité qui entoure un vertiport. Cette aire de sécurité mesure 2D (D value = plus grande longueur hors tout de l’appareil). La D value prise en compte est celle de l’aéronef le plus contraignant accueilli sur ce vertiport.
Cette aire de sécurité est développée sur une hauteur de 3 m, ce qui correspond en moyenne à la hauteur d’un vol stationnaire.
De 3 m à 30 m le volume s’évase ensuite pour atteindre une superficie de 3D par 4D. Cet évasement permettant à l’aéronef d’évoluer légèrement lors des phases de montée ou de descente. En effet en cas de panne d’un moteur la manœuvrabilité de l’aéronef ne sera peut-être pas complète, permettant ainsi à l’aéronef de réaliser ces procédures dégradées.
Une fois à 30 m de haut (hauteur de décision) une pente de monté à 12,5% permettra l’envol ou l’approche standard.
Ces 12,5% correspondent pour les hélicoptères à une trajectoire de type CP2. Ce qui permet de dire que pour les décollages conventionnels au sol ou en terrasse les volumes se rapprocheront sûrement des volumes existants.
Exemple à Cologne où se situe le siège de l’EASA :

Ce volume permet d’éviter les obstacles que représentent la gare et les hôtels.
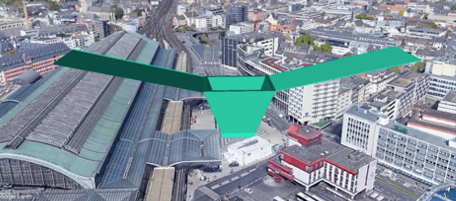
L’obstacle que représente la construction blanche est évité également.

Vue du sol : le vertiport s’intègre dans l’espace urbain.
Conclusion :
Ainsi si la règlementation concernant la conception et la construction des vertiports n’est pas encore déterminée, certains éléments, issus de la règlementation hélistation ou des documents concernant les engins VTOL édités par l’EASA, permettent tout de même d’en dessiner les grandes lignes.
Des expérimentations devront accompagner la définition du cadre réglementaire de l’UAM à l’échelle de la France, de l’Europe et du monde.
Sources :
« Proposed Means of Compliance with the Special Condition VTOL » de l’EASA. Vidéo de Lionel Tauszig, responsable principal de la certification de projet pour le maintien de la navigabilité VTOL à l’EASA : https://www.youtube.com/watch?v=e_fsxgWIENI